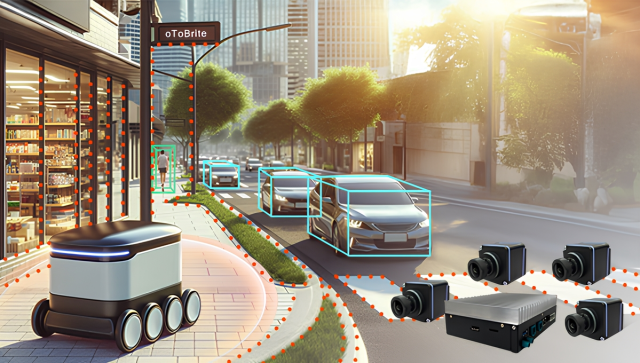
Autonomous Robots with Multi-sensor futuristic in AI-tech




Related Posts

27
Jan
The Factors Shaping the Future of Physical AI
-
Posted by
X-BOTS
Math Becomes the Engine of RoboticsThe next major leap in robotics will come from math, not hardware. Today’s robots are largely reacti...

30
Jul
Visual SLAM are replacing for the Bigger tech company ABB
-
Posted by
Editor
ABB this week said it is extending its portfolio of fully autonomous mobile robots, or AMRs, by equipping its Flexley Mover P604 with 3...

11
Jul
Can Robots Fix the Warehouse Worker Shortage? ProMat 2025 Says Yes
-
Posted by
The cavernous halls of McCormick Place in Chicago played host to ProMat 2025, a sprawling testament to the relentless innovation shapin...

09
Jul
The Automation can help the retailer optimise it workload
-
Posted by
When French retailer Boulanger was looking for a way to automate its warehouse fulfillment process, managers turned to Locus Robotics a...
07
Jul
Understanding the Various Kinds of AGVs and AMRs industry insider
-
Posted by
Looking for the latest innovations in automated material handling? We’ve rounded up the latest crop of Autonomous Mobile Robots (AMRs) ...
04
Jul
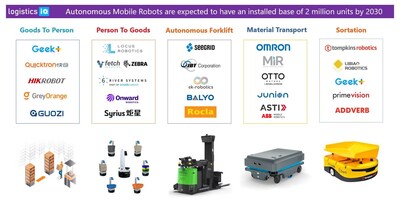
Warehouse Automation Market expected to be grow and exponentially expand until 2030
-
Posted by
Key Market Drivers Fueling the Growth of the Autonomous Mobile Robot (AMR) Market — The global Autonomous Mobile Robot (AMR) market is ...

02
Jul
The in house AMR system, can carry up to one ton heavy payload
-
Posted by
ABB is extending its leadership in AI-powered autonomous mobile robotics with the launch of the Flexley Mover P603 platform AMR, the mo...

25
Jun
Marina Bay Sands Uses Autonomous Robots to Streamline Back-of-House Deliveries
-
Posted by
Singapore is making significant strides in integrating automation and robotics into its business operations, with Marina Bay Sands (MB...

20
May
High-quality AMR robots are about to be launched on the market, and their future direction
-
Posted by
Forklift replacements and legged robots are two AMR solutions our panel of experts anticipate will be seen in the future. “It’s no secr...

15
May
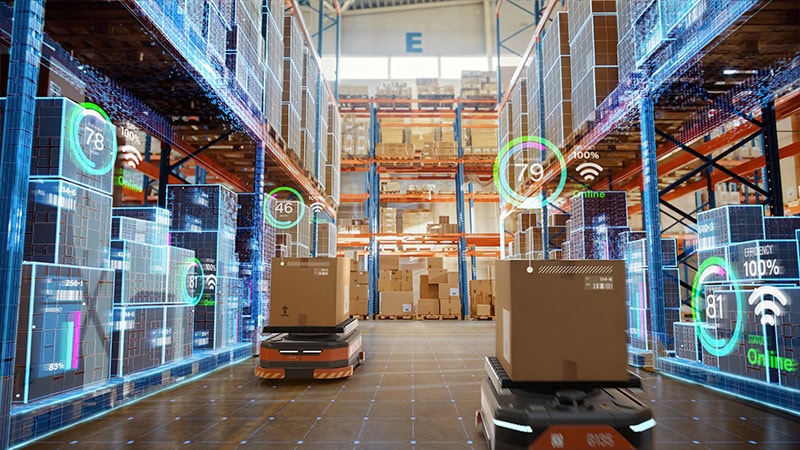
Business Insider: AMR robot for transport and delivery of material
-
Posted by
Autonomous robots are becoming more commonplace in hospital environments, where they can be used to deliver supplies throughout the fac...